转子-轴承-电磁作动器系统振动抑制实验台
转子-轴承-电磁作动器系统振动抑制实验台位于科技大厦109。如图1所示,其组成结构主要包括转子,圆盘,联轴器,可倾瓦滑动轴承,电磁作动器,键相及位移传感器,数据采集系统,控制系统以及驱动电机。
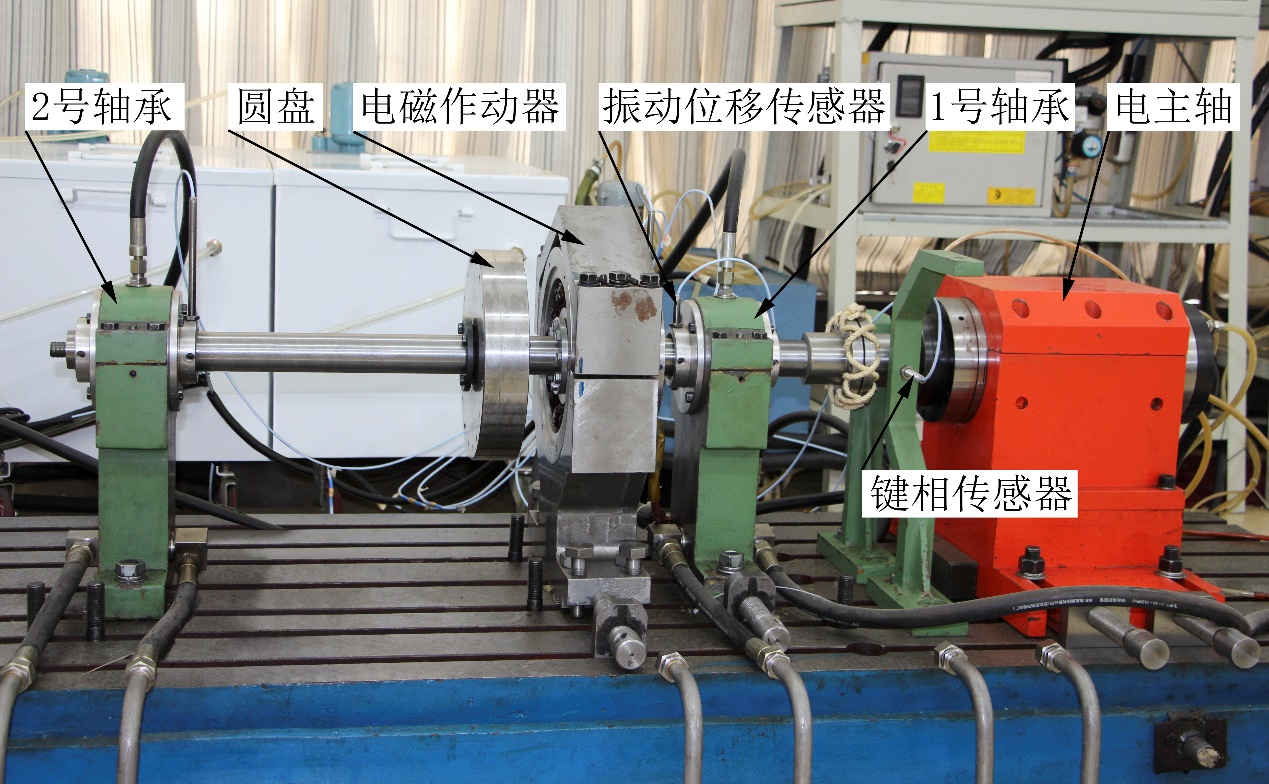
图1 实验台的主体结构
2. 功能介绍
2.1 转子不平衡振动主动抑制研究
针对透平机械转子-轴承系统的不平衡振动故障,基于PD增益自适应调节的自适应控制策略,提出了一种转子不平衡振动故障快速、无超调靶向抑制方法。该方法采用振动位移的PD反馈,通过电磁给力器对转子施加电磁抑制力,改变转子-轴承系统的刚度和阻尼,实现对转子-轴承系统的不平衡振动主动抑制。
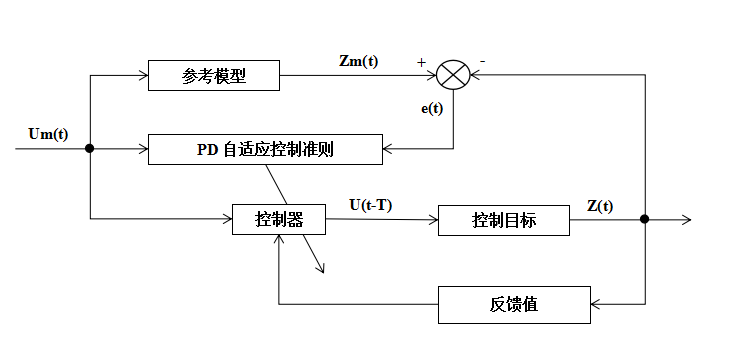
图2 基于PD增益自适应调节的模型参考自适应控制框图
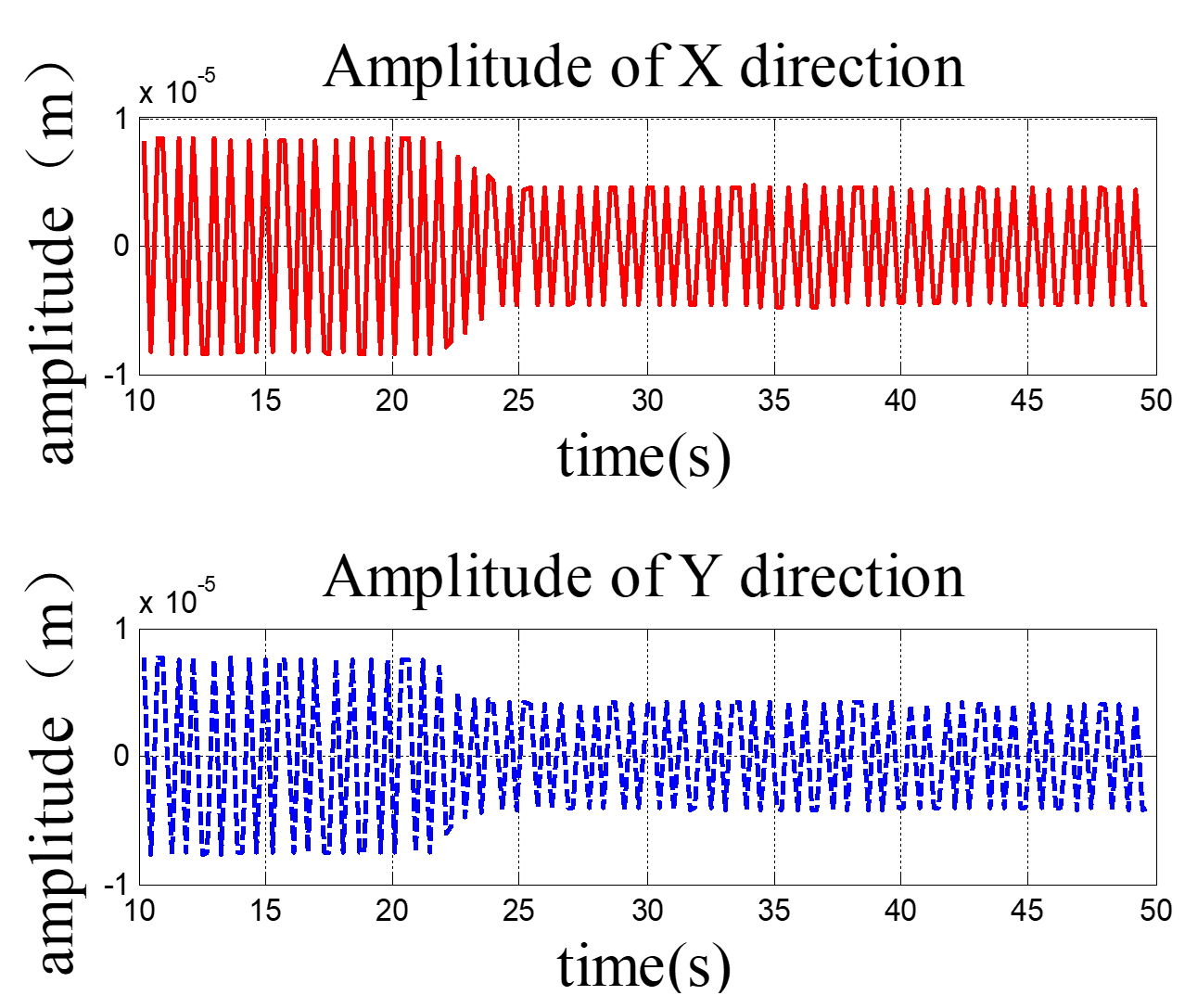
图3 转子实验台2#轴承测点处振动抑制效果
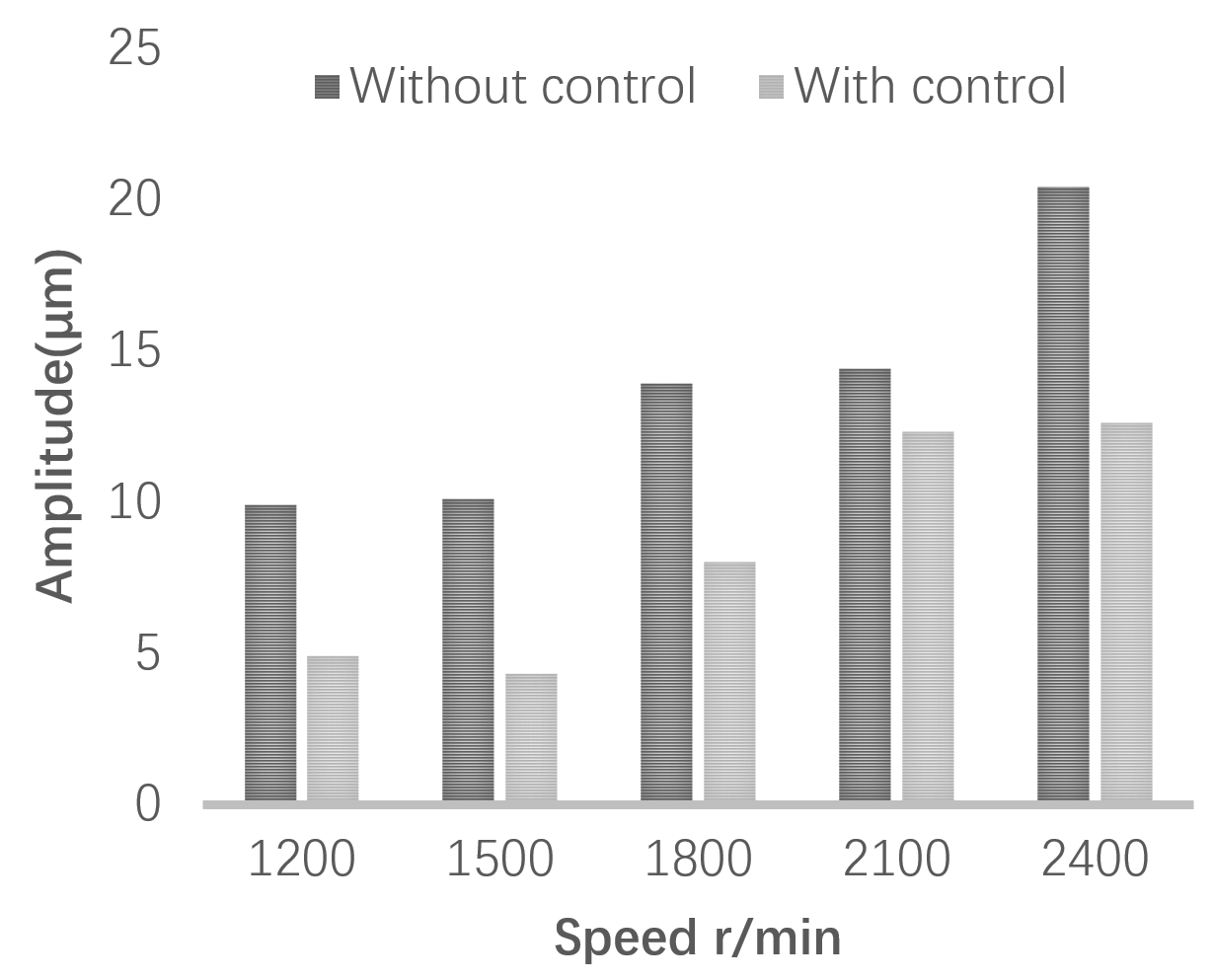
图4 转子不平衡振动不同转速下振动抑制效果
2.2 基于参数自适应寻优的转子多频振动主动抑制研究
以透平机械振动故障靶向抑制为指导,针对透平机械转子-轴承系统的多频振动故障,基于前馈控制原理,提出了一种转子多频振动的靶向抑制方法。该方法采用电磁给力器产生具有与转子振动频率相匹配的多频旋转电磁抑制力作用到转子上,将整周寻优及快速寻优两种寻优策略应用到电磁给力器控制电流的多个频率成分的参数寻优上,以获取控制信号参数,使施加的多个频率成分的电磁力能够削减转子的多频振动幅值,实现转子系统多频振动的主动抑制,为解决透平机械系统转子的现场振动问题提供了新的方法和途径。

图5 转子-轴承系统多频振动靶向抑制框图
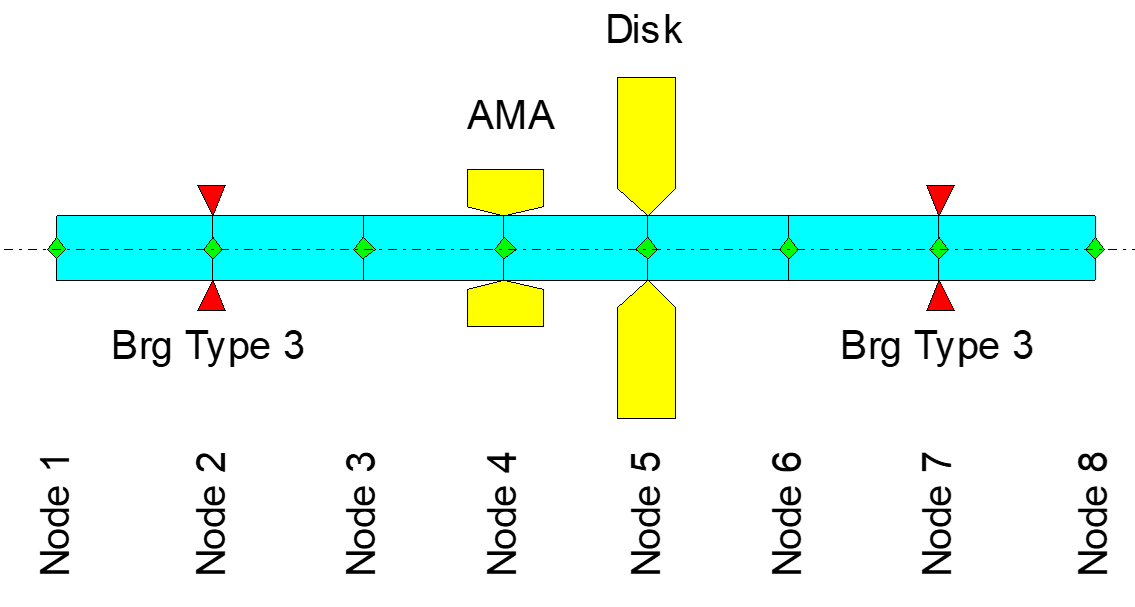
图6 实验台及动力学模型
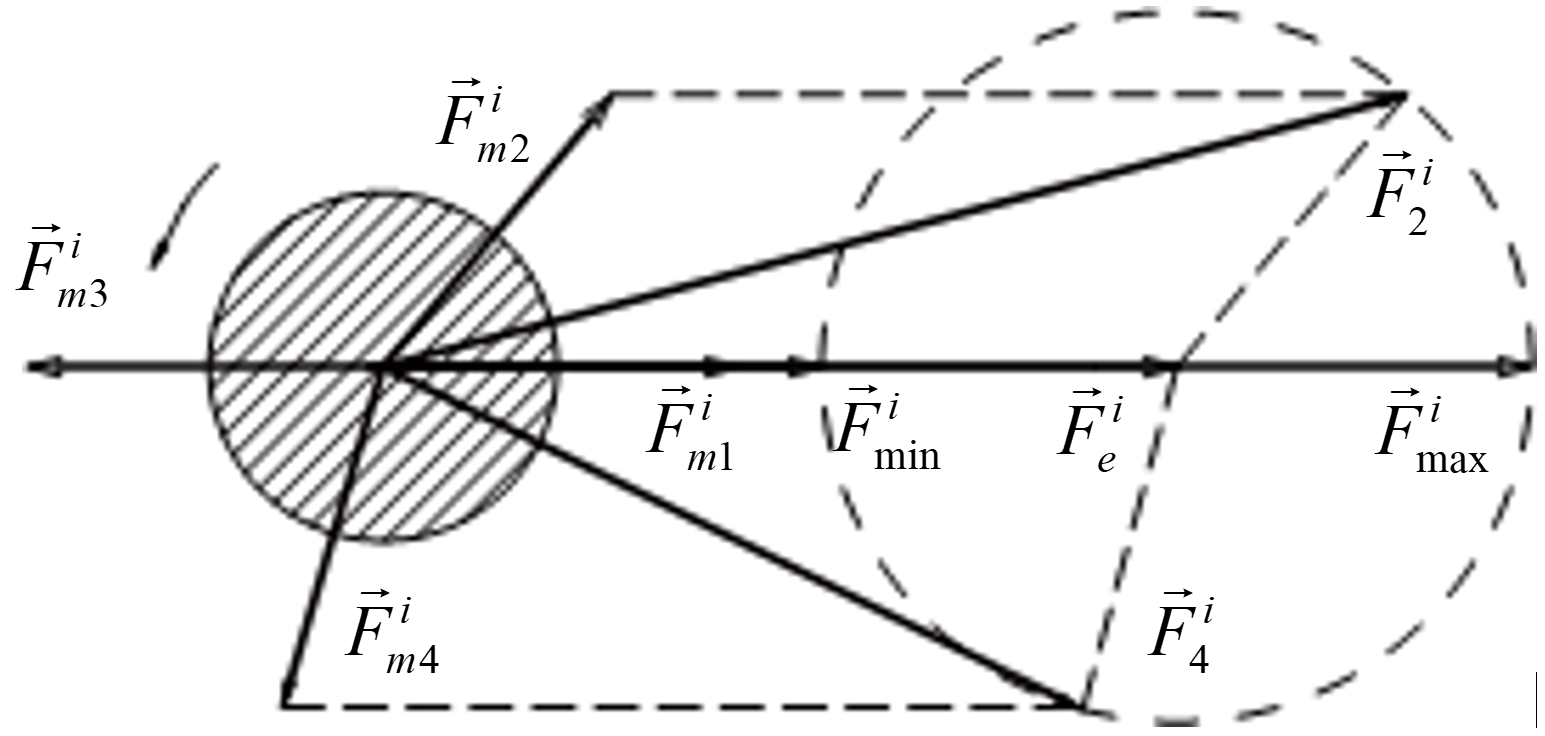
图7 整周寻优策略

图8 快速寻优策略
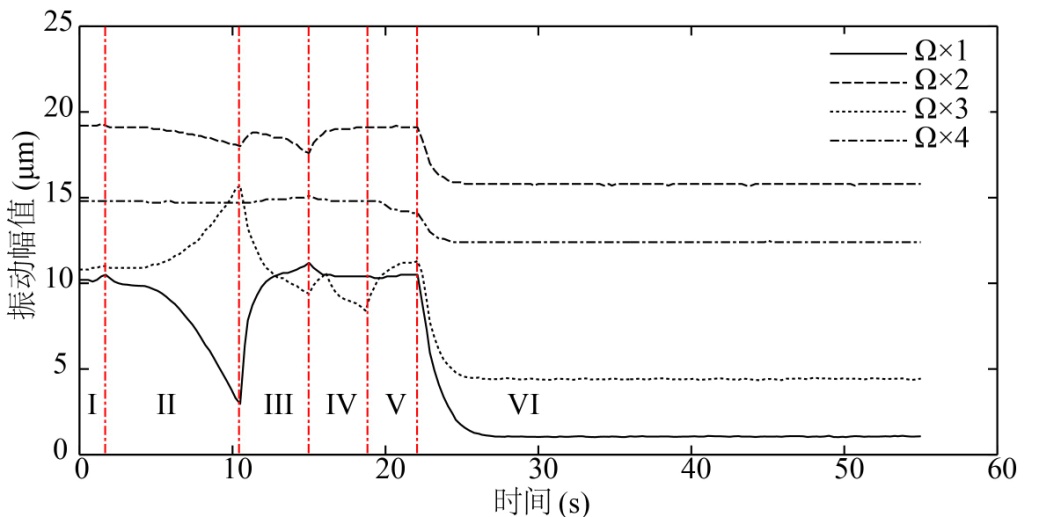
图9 时域振动抑制效果
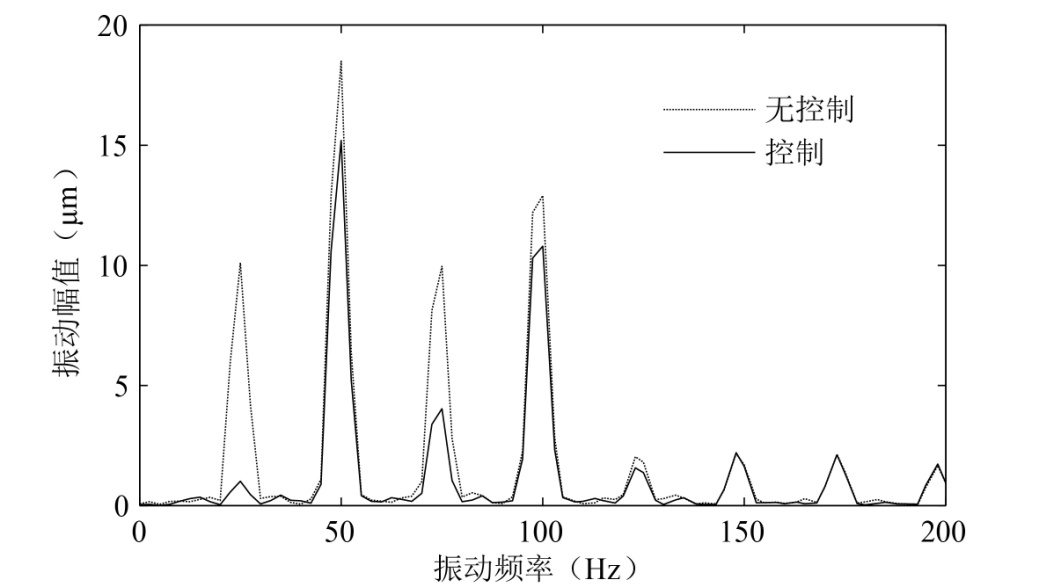
图10 频域振动抑制效果
2.3 基于改进迭代学习控制算法的转子不平衡-不对中耦合振动主动抑制研究
透平机械转子-轴承系统在运转过程中受到具有周期性的干扰力激励,因此,转子振动具有明显的周期性。针对其周期性特征,提出了一种改进的迭代学习控制(MILC)算法,以抑制转子不平衡-不对中耦合故障引起的转子振动。考虑到实际工业应用复杂多变的工况,该MILC算法比例增益P可以根据误差值大小自适应调整。采用陷波滤波器从频域角度提取振动一二倍频成分,该滤波器可以根据实时转速自调整陷波频率,且实验程序的前馈存储周期大小可以根据实时转速自调整,最终实现了转子系统的耦合振动主动抑制。
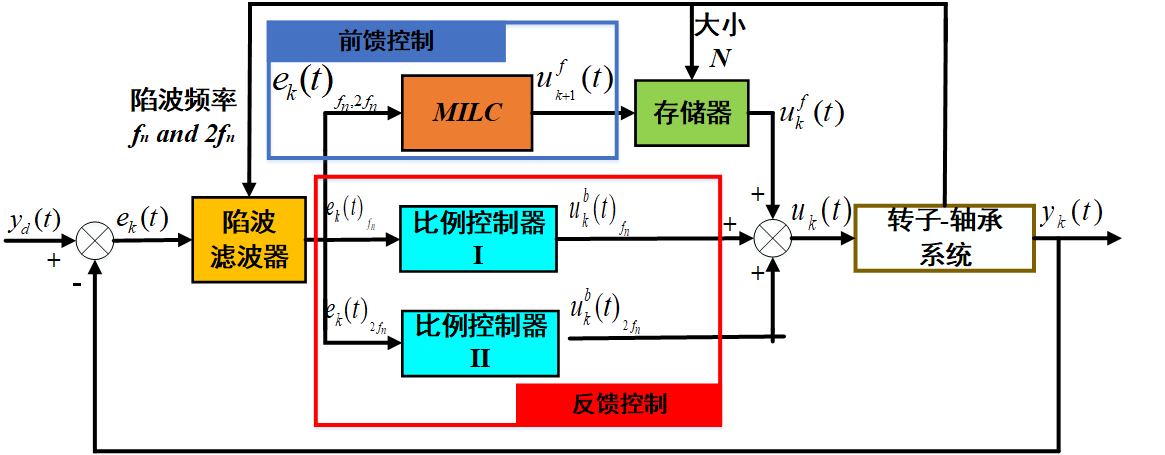
图11 MILC系统方框图
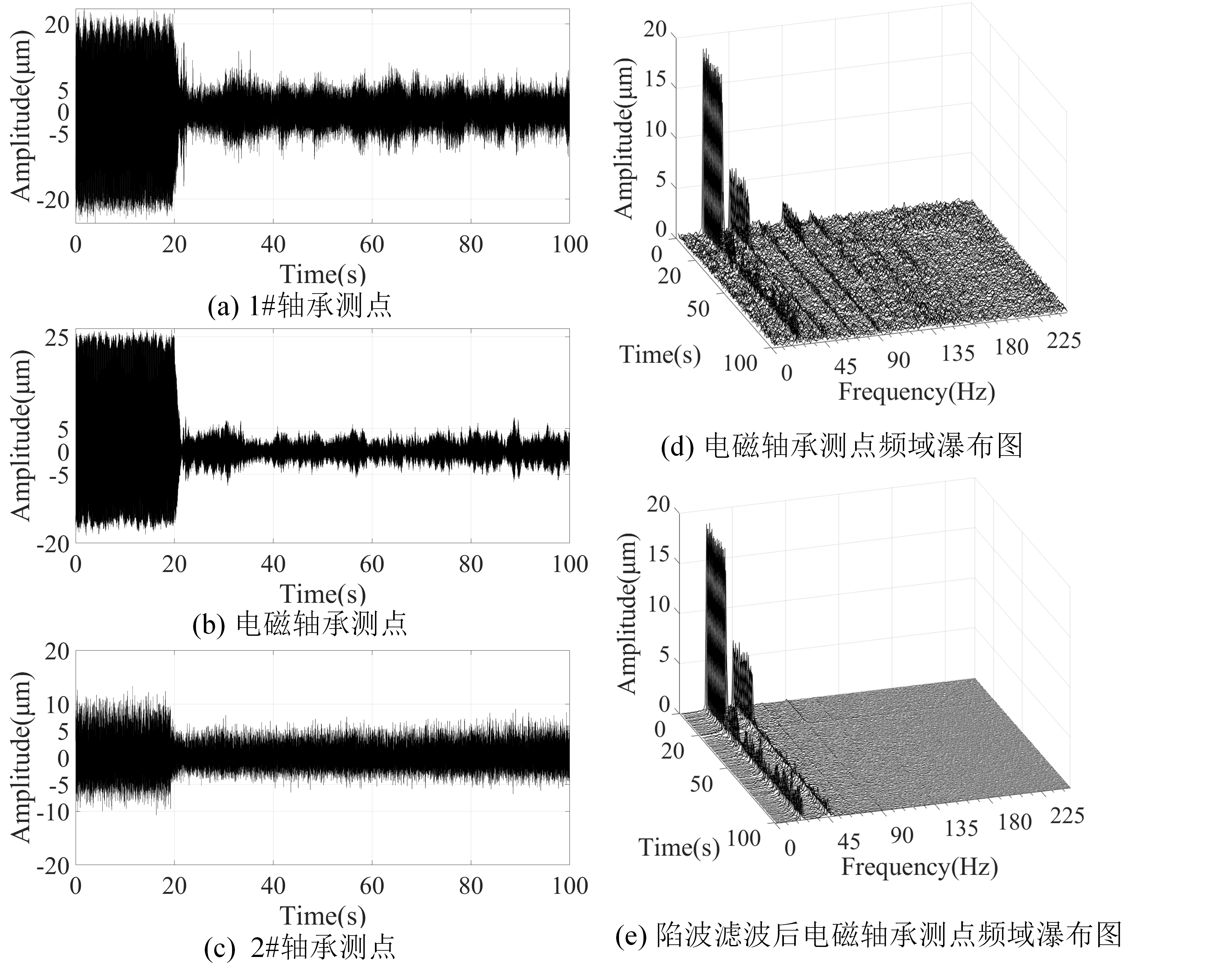
图12 1350 RPM下时频域实验结果图
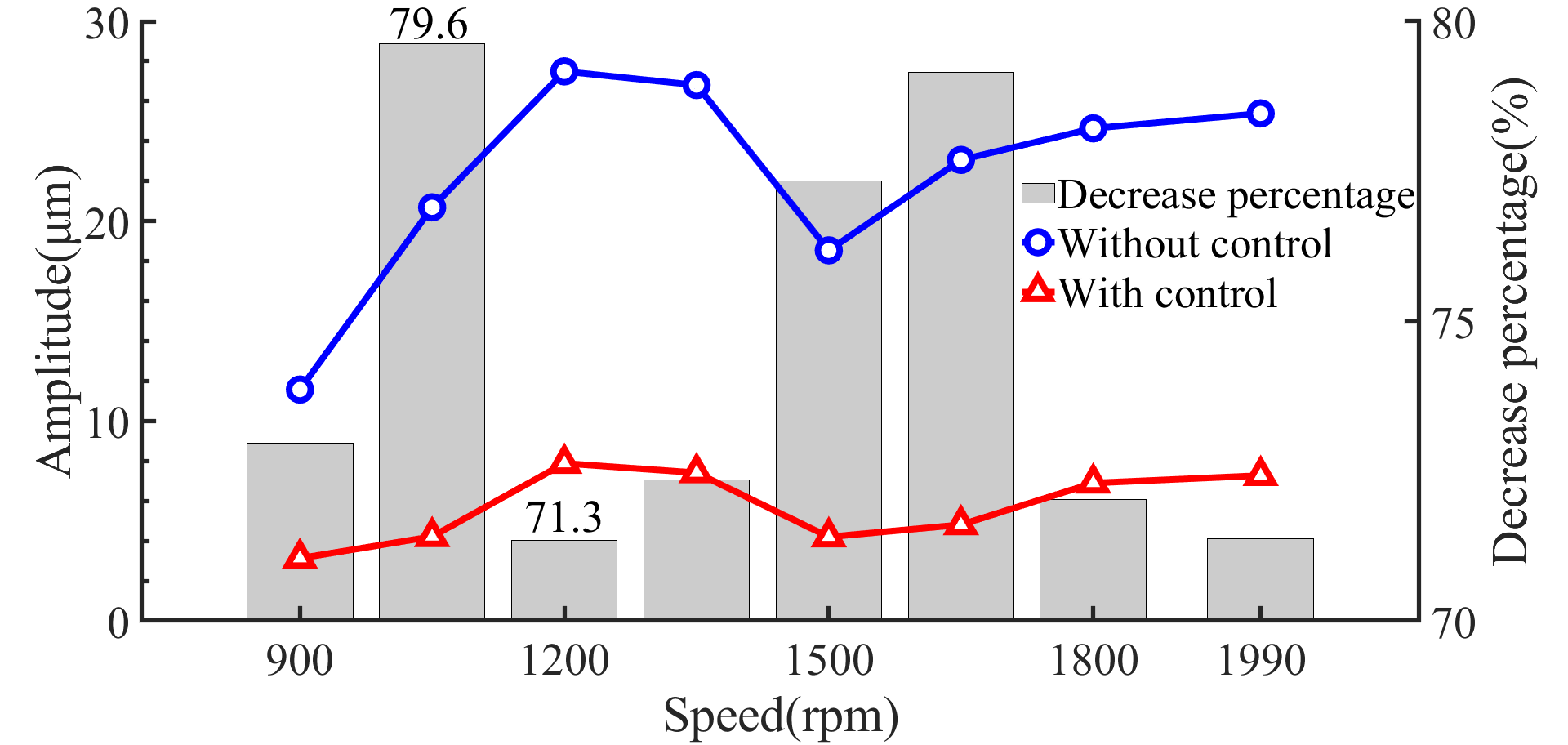
图13 电磁轴承测点多转速对比图
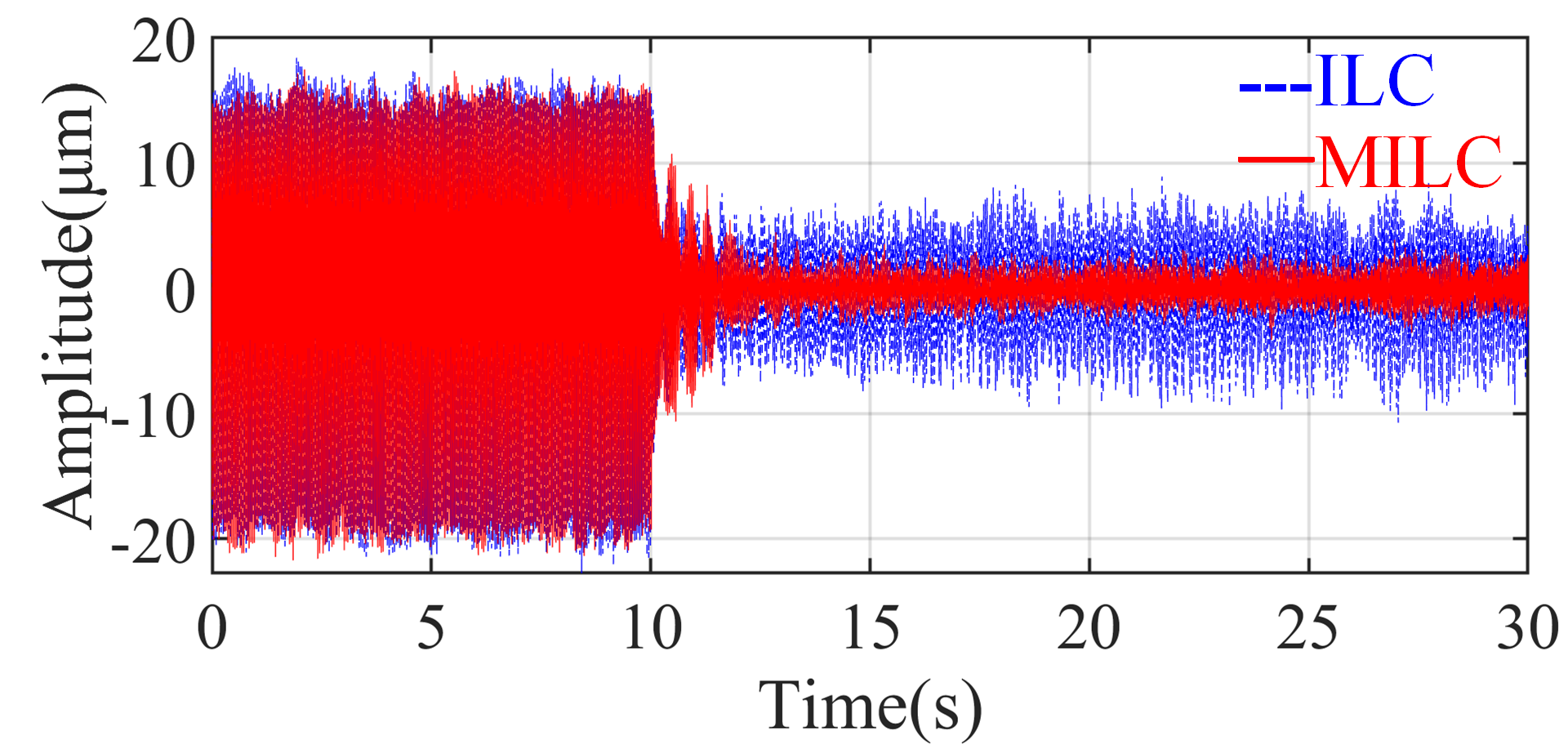
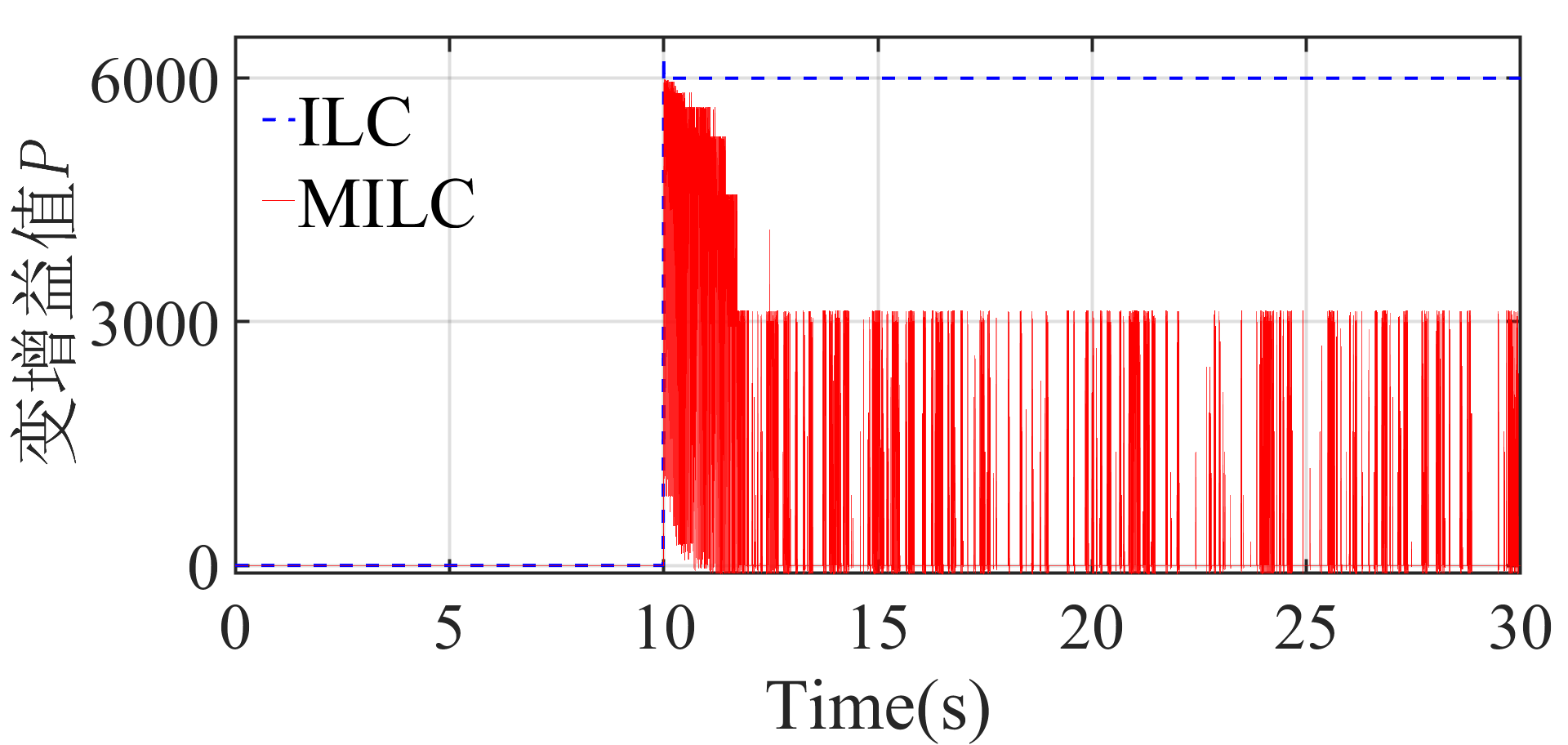
图14 1500 RPM下控制效果对比图
负责人:姚剑飞 邮箱:yaojf@mail.buct.edu.cn